���ܻ����˳��ݽ������
2021/6/8 9:53:21�����
���ܻ����˳��ݽ������
 �����˳�������
�����˳�������
1������������˹�Խ��Խ���㷺Ӧ�ã���ɨ�ء������Ͳ͡�Ѳ��ȣ�
2������������Զ����ݣ��ѵ��ݺ��е���ǰ¥�㣿
3�����ݵ��˻���������жϿ������ҿ���λ�ˣ��������ڹ��ţ�
4��������Ҫ��¥���ֱ����к����е�������������ͬʱ������������ѡ����ȷ�ĵ��ݽ��룿
5��������ݺ�����ôѡ��¥�㣬����Ӧ¥��ȥ��
6��������Ҫȥ8¥�����6¥�����£���������ô�жϴ�ʱ���ܳ����ݣ�
�����˷���ָ��ʵ�ֵ��ݺ��ݣ�
��1���������ڵ����⣬ͨ��Wifi��������LoRa��Zigbee��2.4G��433M��������4G����ȷ���ָ���������ݿ�ϵͳ��ϵͳ�Զ�������¥����¥������ʵ�ֺ��ݹ��ܡ�
��2���е��ݵ��ﵱǰ¥�㣬�������ݿ�ϵͳ�Զ�����ǰ������״̬�����С����С����ѿ������ڹ��ŵ���Ϣ���������ˣ��Ա��������ѡ����ȷ���ݽ��롣
�����˷���ָ��ʵ�ֵ���ѡ�㣺
��1�������˽�����ݺ�ͨ��Wifi��������LoRa�� Zigbee��2.4G��433M��������4G����ȷ����������ݿ�ϵͳ��ϵͳ�Զ�������Ӧ¥�㰴�������緢ȥ6¥ָ���6¥�����Զ������������ͻ�����Ա��6¥��
��2����;�е���ͣ�������ţ��������ݿ�ϵͳ����ǰ����ͣ��¥����ʵʱ���������ˣ������������ǰ�����ݡ�
��������˵��
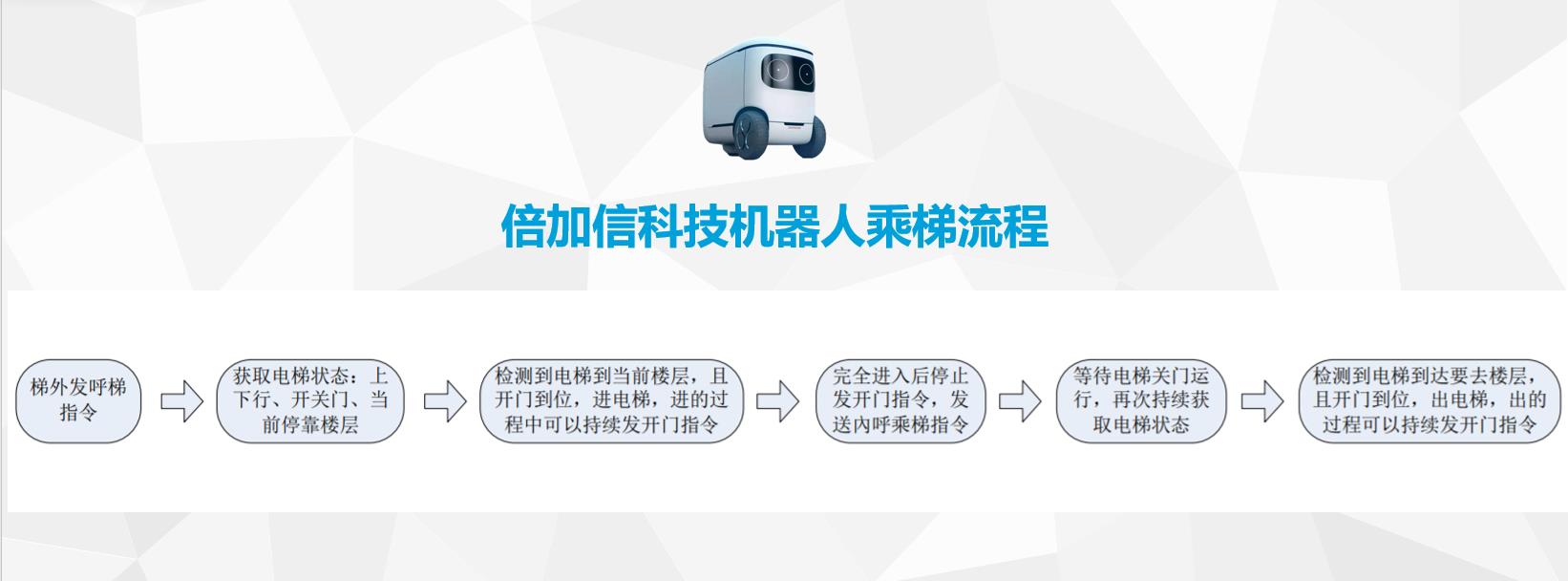
��1�� �����˵������ſڸ����������������ָ��������ݿ�ϵͳ���ݻ����˷���ָ�����ݣ�������ǰ¥���ϰ��������°�����
��2�� �����˿�ʼ���Ͷ���������״ָ̬����������ݿ�ϵͳ������ÿ���ȡһ�Σ��ж����з���ǰ¥�㡢����״̬�������з����ǻ�����Ҫȥ�ķ������С����У���ͣ��¥���ǻ����˵�ǰ¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ������ݣ�
��3�� �����˽�����ݹ��̿��Գ������̓Ⱥ�����¥�㰴��ָ����������ݿ�ϵͳ��ʵ�ֵ������Ű�ť������ÿ��һ�Σ�ֱ����������ȫ�������Ϊֹ��
��4�� ��������ȫ������ݺ��̓Ⱥ�����¥�㰴��ָ����������ݿ�ϵͳ������Ҫȥ��¥�㰴����������ϵȴ������Զ����ţ�����������˷�����ָ���Щ����û�з��й��ܿ��ܻ���ּ��������
��5�� �����˿�ʼ���Ͷ���������״ָ̬���������ݿ�ϵͳ������ÿ���ȡһ�Σ��жϵ�ǰ¥�㡢����״̬����ͣ��¥���ǻ�����Ҫȥ��¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ�����ݣ�
��6�� �����˳����ݹ��̿��Գ������̓Ⱥ�����¥�㰴��ָ����������ݿ�ϵͳ���������Ű�ť��ÿ��һ�Σ�ֱ����������ȫ������Ϊֹ��
��������ư�����˳�������
��1�� �����˵������ſڸ��������̓Ⱥ�����¥�㰴��(0x120A)ָ�������ǰ¥�㰴����
��2�� �����˿�ʼ���Ͷ���������״̬(0x0024)ָ�����ÿ���ȡһ�Σ��ж����з���ǰ¥�㡢����״̬����ʱ�������������
a�������з����ǻ�����Ҫȥ�ķ������С����У���ͣ��¥���ǻ����˵�ǰ¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ������ݣ�
b������ſ��˵����з�����Ҫȥ��¥�㷽�����˿��Բ������ݣ������ݹ����ߺ�ע��Ҫ�ߺ�ŷ�ָ���Ȼ�����ڵ�ǰ¥�����ǿ��ŵ�һֱ��ָ��ᵼ�µ��ݲ����ţ����ݲ���Ҳ���ߣ��������Ⱥ�����¥�㰴��(0x120A)ָ�������ǰ¥�㰴����ֱ���з����ǻ�����Ҫȥ�ķ���ͣ��¥���ǻ����˵�ǰ¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ������ݡ������������8¥Ҫ��1¥�������������������20¥�ĵ������ˣ�8¥��Ҳ�Ὺ�������˵ȵ����ߺ��ٷ�����8¥ָ����ܵ��ݵ�����������а����ƣ������˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���1¥���ٱ����������8¥Ҫ��9¥����ǰ�������˳���Ҫ������Ҫȥ1¥������8¥�����ſ���ƻ��𣬵ȵ��ݵ�1¥�����е��ݰ����ƶ����𣬻�������Ҫ���µ���9¥�����ݵ����ݿ�ϵͳ������⣬�����˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���9¥��
c������ſ��˵����з�����Ҫȥ��¥�㷽��Ҳ���Խ����ݣ����ŵ���һֱ����ǰ�����������Ҫȥ��¥�㣬Ȼ����ȥ������Ҫȥ¥�㡣�����������8¥Ҫ��1¥����������е������ˣ�8¥��Ҳ�Ὺ�������˽����ݺ��ٷ�����1¥ָ����ܵ��ݵ�����������а����ƣ������˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���1¥���ٱ����������8¥Ҫ��9¥����ǰ�������˳���������ȥ1¥������8¥�����˽����ݣ��ȵ��ݵ�1¥��������е��ݰ����ƶ����𣬻�������Ҫ���µ���9¥�����ݵ����ݿ�ϵͳ������⣬��˻����˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���9¥��
��3�� �����˿�ʼ���Ͷ���������״̬(0x0024)ָ�����ÿ���ȡһ�Σ��жϵ�ǰ¥�㡢����״̬����ͣ��¥���ǻ�����Ҫȥ��¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ�����ݣ�
��4�� �����˳����ݹ��̿��Գ������̓Ⱥ�����¥�㰴��(0x120A)ָ��������Ű�ť��ÿ��һ�Σ�ֱ����������ȫ������Ϊֹ��
 �����˿���
�����˿���
�����˿��ţ�����ƽ���ſڣ����������Ž�ϵͳ���Ϳ���ָ�ƽ�����Զ���
 �����˹�����ͨ��բ
�����˹�����ͨ��բ
�����˹�բ��������բ�����ϣ���������բ������ϵͳ���Ϳ�բָ�բ���Զ���
 �����������˳���Ӳ������
�����������˳���Ӳ������
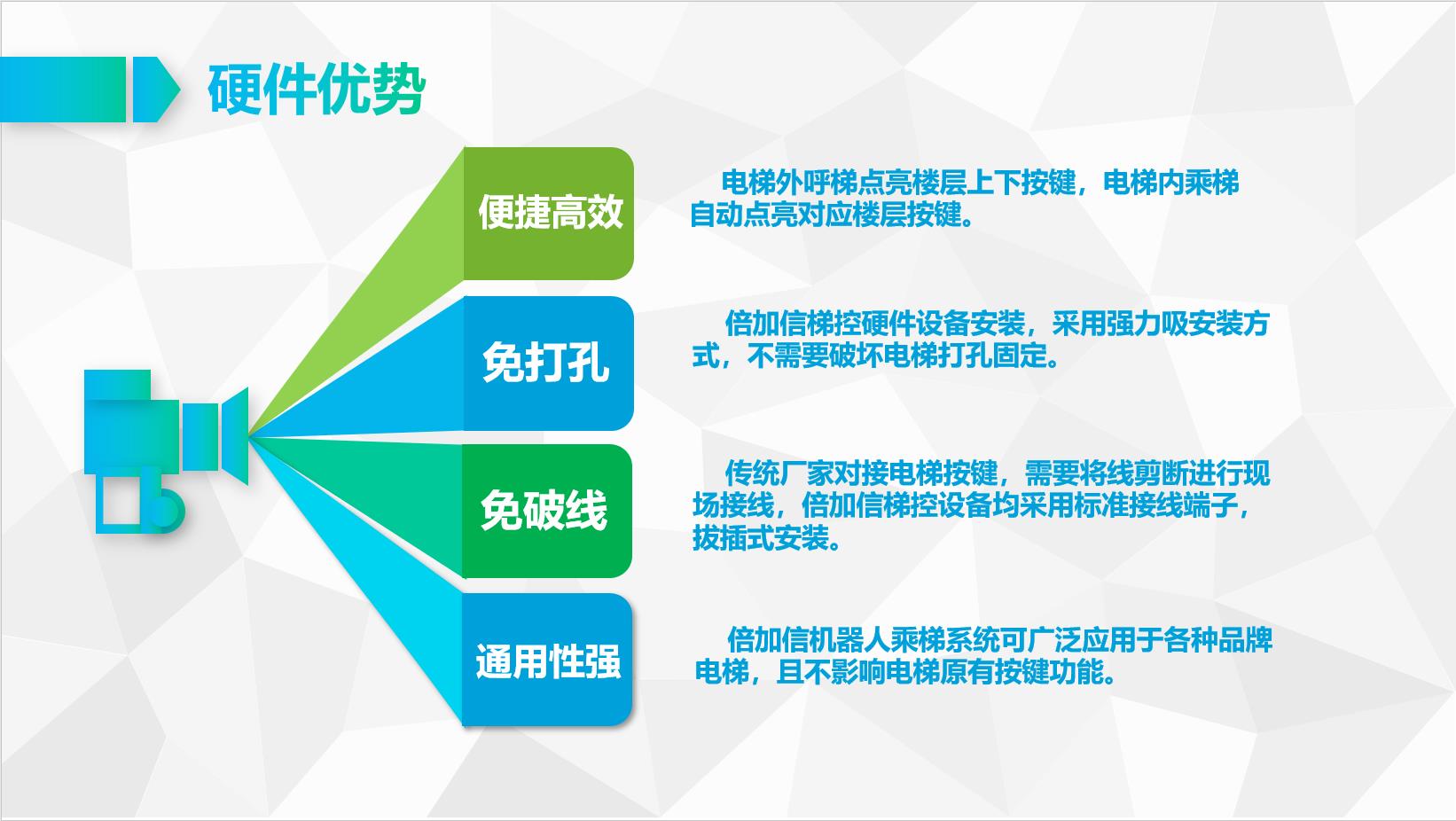
��1����������ݵ���¥�����°����������ڳ����Զ�������Ӧ¥�㰴����
��2���������ݿ�Ӳ���豸��װ������ǿ������װ��ʽ������Ҫ�ƻ����ݴ�̶���
��3����ͳ���ҶԽӵ��ݰ�������Ҫ�����Ͻ����ֳ����ߣ��������ݿ��豸�����ñ����߶��ӣ��β�ʽ��װ��
��4�������������˳���ϵͳ�ɹ㷺Ӧ���ڸ���Ʒ�Ƶ��ݣ��Ҳ�Ӱ�����ԭ�а������ܡ�
�ݿ���������
��1��ÿ������һ�ף���װ�ڵ��ݰ�������
��2�������ף�����ǿ������װ��ʽ��
��3�������߰β�ʽ���ߣ���װ��ݡ�
��4���������ʵʱͨ�ţ����ջ�����ָ��ʵ�ֳ���ѡ�㡣
�������������
��1��ʵʱ��������������
��2�����������������485ͨѶ��������
��3�������ڣ��������������TCP/IPͨѶ
����������ư�
��1�����ݣ����������°�������ÿ��һ�ס�
��2�������ף�����ǿ������װ��ʽ��
��3��ÿ���豸���ô�����ʽ��
����״̬����
��1��ʵʱ������������״̬
��2��ʵʱ�����ݿ�����״̬
��3��ʵʱ�����ݵ�ǰͣ��¥����Ϣ
����״̬���н�������˳����������⣺
a�����ݵ��˻���������жϿ������ҿ���λ�ˣ��������ڵ��ݹ��ţ����ܻ����˻�û�����˰��˹��Ű�������
b��������Ҫ��¥���ֱ����к����е�������������ͬʱ������������ѡ����ȷ�ĵ��ݽ��룿
c��������Ҫȥ8¥�����6¥�����£���������ô�жϴ�ʱ���ܳ����ݣ�
���������ݿ�����
��1��������˹�˾�Ʒ�����ͨѶ
��2�����ջ����˺��ݺͳ���ָ��
��3�����ȵ���ʵ������
1������������˹�Խ��Խ���㷺Ӧ�ã���ɨ�ء������Ͳ͡�Ѳ��ȣ�
2������������Զ����ݣ��ѵ��ݺ��е���ǰ¥�㣿
3�����ݵ��˻���������жϿ������ҿ���λ�ˣ��������ڹ��ţ�
4��������Ҫ��¥���ֱ����к����е�������������ͬʱ������������ѡ����ȷ�ĵ��ݽ��룿
5��������ݺ�����ôѡ��¥�㣬����Ӧ¥��ȥ��
6��������Ҫȥ8¥�����6¥�����£���������ô�жϴ�ʱ���ܳ����ݣ�
�����˷���ָ��ʵ�ֵ��ݺ��ݣ�
��1���������ڵ����⣬ͨ��Wifi��������LoRa��Zigbee��2.4G��433M��������4G����ȷ���ָ���������ݿ�ϵͳ��ϵͳ�Զ�������¥����¥������ʵ�ֺ��ݹ��ܡ�
��2���е��ݵ��ﵱǰ¥�㣬�������ݿ�ϵͳ�Զ�����ǰ������״̬�����С����С����ѿ������ڹ��ŵ���Ϣ���������ˣ��Ա��������ѡ����ȷ���ݽ��롣
�����˷���ָ��ʵ�ֵ���ѡ�㣺
��1�������˽�����ݺ�ͨ��Wifi��������LoRa�� Zigbee��2.4G��433M��������4G����ȷ����������ݿ�ϵͳ��ϵͳ�Զ�������Ӧ¥�㰴�������緢ȥ6¥ָ���6¥�����Զ������������ͻ�����Ա��6¥��
��2����;�е���ͣ�������ţ��������ݿ�ϵͳ����ǰ����ͣ��¥����ʵʱ���������ˣ������������ǰ�����ݡ�
��������˵��
��1�� �����˵������ſڸ����������������ָ��������ݿ�ϵͳ���ݻ����˷���ָ�����ݣ�������ǰ¥���ϰ��������°�����
��2�� �����˿�ʼ���Ͷ���������״ָ̬����������ݿ�ϵͳ������ÿ���ȡһ�Σ��ж����з���ǰ¥�㡢����״̬�������з����ǻ�����Ҫȥ�ķ������С����У���ͣ��¥���ǻ����˵�ǰ¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ������ݣ�
��3�� �����˽�����ݹ��̿��Գ������̓Ⱥ�����¥�㰴��ָ����������ݿ�ϵͳ��ʵ�ֵ������Ű�ť������ÿ��һ�Σ�ֱ����������ȫ�������Ϊֹ��
��4�� ��������ȫ������ݺ��̓Ⱥ�����¥�㰴��ָ����������ݿ�ϵͳ������Ҫȥ��¥�㰴����������ϵȴ������Զ����ţ�����������˷�����ָ���Щ����û�з��й��ܿ��ܻ���ּ��������
��5�� �����˿�ʼ���Ͷ���������״ָ̬���������ݿ�ϵͳ������ÿ���ȡһ�Σ��жϵ�ǰ¥�㡢����״̬����ͣ��¥���ǻ�����Ҫȥ��¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ�����ݣ�
��6�� �����˳����ݹ��̿��Գ������̓Ⱥ�����¥�㰴��ָ����������ݿ�ϵͳ���������Ű�ť��ÿ��һ�Σ�ֱ����������ȫ������Ϊֹ��
��������ư�����˳�������
��1�� �����˵������ſڸ��������̓Ⱥ�����¥�㰴��(0x120A)ָ�������ǰ¥�㰴����
��2�� �����˿�ʼ���Ͷ���������״̬(0x0024)ָ�����ÿ���ȡһ�Σ��ж����з���ǰ¥�㡢����״̬����ʱ�������������
a�������з����ǻ�����Ҫȥ�ķ������С����У���ͣ��¥���ǻ����˵�ǰ¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ������ݣ�
b������ſ��˵����з�����Ҫȥ��¥�㷽�����˿��Բ������ݣ������ݹ����ߺ�ע��Ҫ�ߺ�ŷ�ָ���Ȼ�����ڵ�ǰ¥�����ǿ��ŵ�һֱ��ָ��ᵼ�µ��ݲ����ţ����ݲ���Ҳ���ߣ��������Ⱥ�����¥�㰴��(0x120A)ָ�������ǰ¥�㰴����ֱ���з����ǻ�����Ҫȥ�ķ���ͣ��¥���ǻ����˵�ǰ¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ������ݡ������������8¥Ҫ��1¥�������������������20¥�ĵ������ˣ�8¥��Ҳ�Ὺ�������˵ȵ����ߺ��ٷ�����8¥ָ����ܵ��ݵ�����������а����ƣ������˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���1¥���ٱ����������8¥Ҫ��9¥����ǰ�������˳���Ҫ������Ҫȥ1¥������8¥�����ſ���ƻ��𣬵ȵ��ݵ�1¥�����е��ݰ����ƶ����𣬻�������Ҫ���µ���9¥�����ݵ����ݿ�ϵͳ������⣬�����˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���9¥��
c������ſ��˵����з�����Ҫȥ��¥�㷽��Ҳ���Խ����ݣ����ŵ���һֱ����ǰ�����������Ҫȥ��¥�㣬Ȼ����ȥ������Ҫȥ¥�㡣�����������8¥Ҫ��1¥����������е������ˣ�8¥��Ҳ�Ὺ�������˽����ݺ��ٷ�����1¥ָ����ܵ��ݵ�����������а����ƣ������˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���1¥���ٱ����������8¥Ҫ��9¥����ǰ�������˳���������ȥ1¥������8¥�����˽����ݣ��ȵ��ݵ�1¥��������е��ݰ����ƶ����𣬻�������Ҫ���µ���9¥�����ݵ����ݿ�ϵͳ������⣬��˻����˴�ʱ��Ҫ�жϵ��ݿ�ʼ������ʻ���ٵ���9¥��
��3�� �����˿�ʼ���Ͷ���������״̬(0x0024)ָ�����ÿ���ȡһ�Σ��жϵ�ǰ¥�㡢����״̬����ͣ��¥���ǻ�����Ҫȥ��¥�㣬���ſ���λ�ˣ������˾Ϳ��Կ�ʼ�����ݣ�
��4�� �����˳����ݹ��̿��Գ������̓Ⱥ�����¥�㰴��(0x120A)ָ��������Ű�ť��ÿ��һ�Σ�ֱ����������ȫ������Ϊֹ��
�����˿��ţ�����ƽ���ſڣ����������Ž�ϵͳ���Ϳ���ָ�ƽ�����Զ���
�����˹�բ��������բ�����ϣ���������բ������ϵͳ���Ϳ�բָ�բ���Զ���
��1����������ݵ���¥�����°����������ڳ����Զ�������Ӧ¥�㰴����
��2���������ݿ�Ӳ���豸��װ������ǿ������װ��ʽ������Ҫ�ƻ����ݴ�̶���
��3����ͳ���ҶԽӵ��ݰ�������Ҫ�����Ͻ����ֳ����ߣ��������ݿ��豸�����ñ����߶��ӣ��β�ʽ��װ��
��4�������������˳���ϵͳ�ɹ㷺Ӧ���ڸ���Ʒ�Ƶ��ݣ��Ҳ�Ӱ�����ԭ�а������ܡ�
�ݿ���������
��1��ÿ������һ�ף���װ�ڵ��ݰ�������
��2�������ף�����ǿ������װ��ʽ��
��3�������߰β�ʽ���ߣ���װ��ݡ�
��4���������ʵʱͨ�ţ����ջ�����ָ��ʵ�ֳ���ѡ�㡣
�������������
��1��ʵʱ��������������
��2�����������������485ͨѶ��������
��3�������ڣ��������������TCP/IPͨѶ
����������ư�
��1�����ݣ����������°�������ÿ��һ�ס�
��2�������ף�����ǿ������װ��ʽ��
��3��ÿ���豸���ô�����ʽ��
����״̬����
��1��ʵʱ������������״̬
��2��ʵʱ�����ݿ�����״̬
��3��ʵʱ�����ݵ�ǰͣ��¥����Ϣ
����״̬���н�������˳����������⣺
a�����ݵ��˻���������жϿ������ҿ���λ�ˣ��������ڵ��ݹ��ţ����ܻ����˻�û�����˰��˹��Ű�������
b��������Ҫ��¥���ֱ����к����е�������������ͬʱ������������ѡ����ȷ�ĵ��ݽ��룿
c��������Ҫȥ8¥�����6¥�����£���������ô�жϴ�ʱ���ܳ����ݣ�
���������ݿ�����
��1��������˹�˾�Ʒ�����ͨѶ
��2�����ջ����˺��ݺͳ���ָ��
��3�����ȵ���ʵ������
- ��һƪ�����ܻ�����WIFIͨ�ų��ݽ������ 2021/6/8
- ��һƪ�����ݼ�װ��ƿ��������ݱ�����ͷ���Ƿ���Ҫ�����飿�綯������ 2021/6/4

 ���������� 44030602004070��
���������� 44030602004070��