




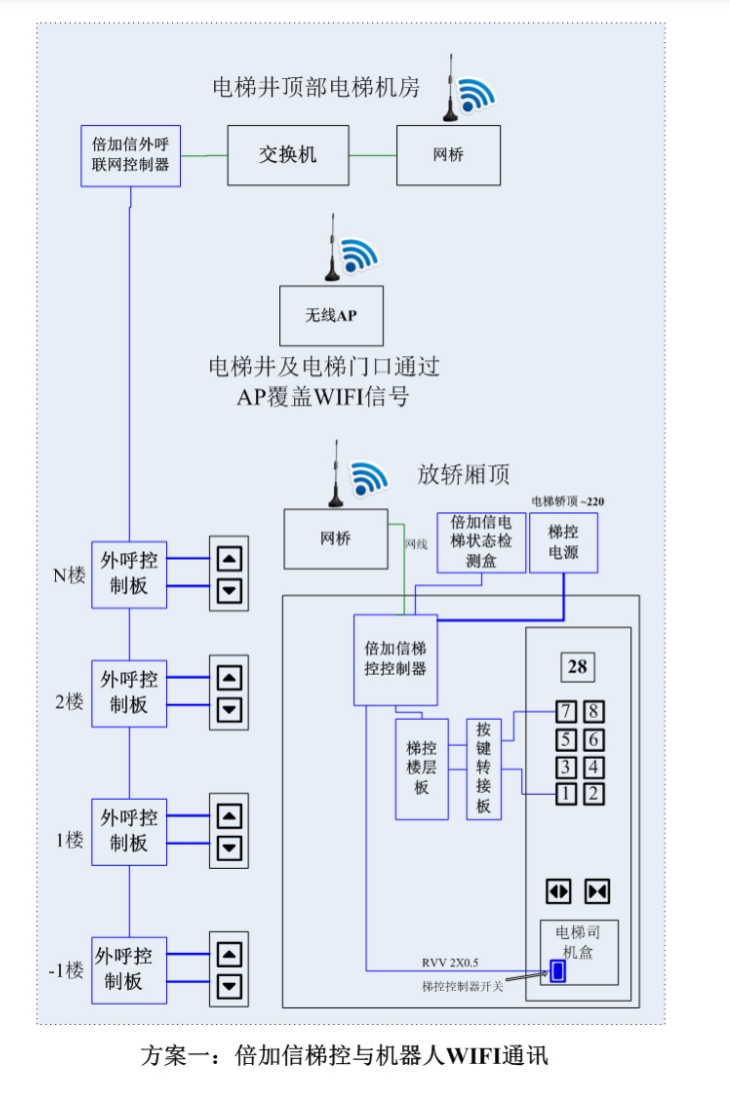
ΜζΤς»Υ≥ΥΧίΒΡΦΦ θΫβΈωΘΚ±ΕΦ”–≈»Υ Ν≥ Ε ±πΓΔΜΖΨ≥Η–÷ΣΓΔ¬ΖΨΕΙφΜ°Β»
ΫϋΡξά¥Θ§ΥφΉ≈ΩΤΦΦΒΡΖΔ’ΙΚΆ»ΥΟ«Ε‘…ζΜν÷ ΝΩΒΡ≤ΜΕœΉΖ«σΘ§ΜζΤς»ΥΦΦ θ÷πΫΞ≥…ΈΣΝΥ»»Ο≈ΜΑΧβΓΘ‘Ύ»’≥Θ…ζΜν÷–Θ§Έ“Ο«≥Θ≥ΘΡήΙΜΩ¥ΒΫΜζΤς»ΥΒΡ…μ”ΑΘ§±»»γ‘Ύ≤ΆΧϋ÷–…®ΒΊΒΡ…®ΒΊΜζΤς»ΥΓΔ‘ΎΨΤΒξ÷–ΥΆ≤ΆΒΡ≈δΥΆΜζΤς»ΥΒ»ΓΘΕχ‘ΎΧΊ β≥ΓΨΑœ¬Θ§±»»γ‘ΎΗΏ≤ψΫ®÷ΰΈο÷–Θ§≥ΥΧίΜζΤς»ΥΒΡ≥ωœ÷Ηϋ «ΈΣΈ“Ο«ΒΡ…ζΜν¥χά¥ΝΥΦΪ¥σΒΡ±ψάϊΓΘ±ΨΈΡΫΪœξœΗΫι…ήΜζΤς»Υ≥ΥΧίΒΡΒΉ≤ψΦΦ θΘ§Αϋά®±ΕΦ”–≈»Υ Ν≥ Ε ±πΓΔΜΖΨ≥Η–÷ΣΓΔ¬ΖΨΕΙφΜ°Β»ΓΘ
±ΕΦ”–≈»Υ Ν≥ Ε ±πΦΦ θ «ΜζΤς»Υ≥ΥΧίΒΡ÷Ί“ΣΒΉ≤ψΦΦ θ÷°“ΜΓΘΆ®Ιΐ±ΕΦ”–≈»Υ Ν≥ Ε ±πΦΦ θΘ§ΜζΤς»ΥΩ…“‘ΉΦ»Ζ Ε±π≥ΥΩΆΒΡ…μΖί–≈œΔΘ§¥”ΕχΈΣ≥ΥΩΆΧαΙ©Ηω–‘Μ·ΒΡΖΰΈώΓΘ‘Ύ≥ΥΧί≥ΓΨΑœ¬Θ§±ΕΦ”–≈»Υ Ν≥ Ε ±πΦΦ θΩ…“‘Ά®ΙΐΕ‘≥ΥΩΆΟφ≤ΩΒΡΧΊ’ςΫχ–– Ε±πΘ§ΩλΥΌ≈–Εœ≥ΥΩΆΒΡ…μΖί–≈œΔΘ§±»»γ…μΖί÷ΛΚ≈¬κΓΔ–’ΟϊΓΔΡξΝδΒ»Θ§¥”ΕχΗυΨί≤ΜΆ§≥ΥΩΆΒΡ–η«σΧαΙ©≤ΜΆ§ΒΡΖΰΈώΓΘ±»»γΘ§Ε‘”ΎάœΡξ»ΥΜρ’Ώ…μΧε≤Μ±ψΒΡ≥ΥΩΆΘ§ΜζΤς»ΥΩ…“‘÷ςΕ·ΧαΙ©Αο÷ζΘ§±»»γΑο÷ζ≥ΥΩΆΑ¥œ¬ΒγΧίΑ¥≈ΞΓΔΧα–―≥ΥΩΆΉΔ“βΑ≤»ΪΒ»ΓΘ
‘Ύ±ΕΦ”–≈»Υ Ν≥ Ε ±πΦΦ θΒΡ Βœ÷Ιΐ≥Χ÷–Θ§Ά®≥Θ–η“Σ≤…Φ·¥σΝΩΒΡ»ΥΝ≥ ΐΨίΘ§Ϋ®ΝΔ“ΜΗωΉΦ»ΖΒΡ±ΕΦ”–≈»Υ Ν≥ Ε ±πΡΘ–ΆΓΘ‘ΎΜζΤς»Υ≥ΥΧίΒΡ≥ΓΨΑœ¬Θ§ΈΣΝΥ±Θ÷Λ±ΕΦ”–≈»Υ Ν≥ Ε ±πΒΡΉΦ»Ζ–‘ΚΆΩ…ΩΩ–‘Θ§–η“ΣΕ‘±ΕΦ”–≈»Υ Ν≥ Ε ±πΥψΖ®Ϋχ––”≈Μ·ΚΆΗΡΫχΓΘ±»»γΘ§Ω…“‘Ά®Ιΐ‘ωΦ” ΐΨί―υ±ΨΓΔΦ”»κ»ΥΝ≥Φλ≤βΓΔ»ΥΝ≥Ε‘ΤκΒ»ΖΫΖ®ά¥ΧαΗΏ±ΕΦ”–≈»Υ Ν≥ Ε ±πΒΡΉΦ»Ζ¬ ΓΘ
ΕΰΓΔΜΖΨ≥Η–÷ΣΦΦ θ
ΜζΤς»Υ≥ΥΧίΜΙ–η“ΣΨΏ±ΗΝΦΚΟΒΡΜΖΨ≥Η–÷ΣΦΦ θΓΘΆ®ΙΐΜΖΨ≥Η–÷ΣΦΦ θΘ§ΜζΤς»ΥΩ…“‘Η–÷Σ÷ήΈßΒΡΜΖΨ≥–≈œΔΘ§¥”Εχ»ΖΕ®≥ΥΩΆΒΡΈΜ÷ΟΚΆΉ¥Χ§Θ§ΫχΕχΧαΙ©ΗϋΦ”ΨΪΉΦΒΡΖΰΈώΓΘ‘ΎΜζΤς»Υ≥ΥΧίΒΡ≥ΓΨΑœ¬Θ§ΜΖΨ≥Η–÷ΣΦΦ θΩ…“‘Ά®Ιΐ¥ΪΗ–ΤςΒ»…η±ΗΗ–÷Σ÷ήΈßΒΡ¬ΞΒάΓΔΒγΧίΟ≈ΒΡΩΣΙΊΉ¥Χ§Θ§“‘ΦΑΤδΥϊœύΙΊΒΡΜΖΨ≥–≈œΔΘ§±»»γΈ¬Ε»ΓΔ ΣΕ»Β»ΓΘ’β–©–≈œΔΩ…“‘Αο÷ζΜζΤς»ΥΗϋΚΟΒΊ’ΤΈ’ΒγΧίΡΎΒΡ«ιΩωΘ§ΧαΙ©ΗϋΦ”Χυ–ΡΚΆ±ψάϊΒΡΖΰΈώΓΘ
‘Ύ Βœ÷ΜΖΨ≥Η–÷ΣΦΦ θ ±Θ§–η“Σάϊ”Ο¥ΪΗ–ΤςΒ»…η±ΗΕ‘÷ήΈßΜΖΨ≥Ϋχ––Η–÷ΣΚΆ ’Φ· ΐΨίΘ§≤ΔΕ‘ ΐΨίΫχ––¥ΠάμΚΆΖ÷ΈωΓΘ‘ΎΜζΤς»Υ≥ΥΧίΒΡ≥ΓΨΑœ¬Θ§ΜΖΨ≥Η–÷ΣΦΦ θΒΡ Βœ÷ΜΙ–η“ΣΩΦ¬«ΒΫ“Μ–©ΧΊ β“ρΥΊΘ§±»»γΒγΧίΒΡ–ΈΉ¥ΓΔΒγΧίΡΎ≤ΩΒΡ’’Ος«ιΩωΒ»ΓΘΈΣΝΥ»Ζ±ΘΜΖΨ≥Η–÷ΣΦΦ θΒΡΉΦ»Ζ–‘ΚΆΩ…ΩΩ–‘Θ§–η“ΣΕ‘ΜΖΨ≥Η–÷ΣΥψΖ®Ϋχ––”≈Μ·ΚΆΗΡΫχΘ§±»»γ≤…”ΟΗϋœ»ΫχΒΡ¥ΪΗ–Τς…η±ΗΓΔ”≈Μ· ΐΨί≤…Φ·ΚΆ¥ΠάμΖΫΖ®Β»ΓΘ

‘ΎΜζΤς»Υ≥ΥΧίΒΡ≥ΓΨΑœ¬Θ§¬ΖΨΕΙφΜ°ΦΦ θ“≤ «Ζ«≥Θ÷Ί“ΣΒΡΒΉ≤ψΦΦ θ÷°“ΜΓΘΆ®Ιΐ¬ΖΨΕΙφΜ°ΦΦ θΘ§ΜζΤς»ΥΩ…“‘ΈΣ≥ΥΩΆΧαΙ©ΩλΥΌΓΔΑ≤»ΪΓΔΗΏ–ßΒΡΖΰΈώΘ§±ήΟβ≥ΥΩΆ‘ΎΒγΧίΡΎΟ‘¬ΖΜρ’ΏΉΏ¥μ¬ΖœΏΒΡ«ιΩωΖΔ…ζΓΘ‘Ύ¬ΖΨΕΙφΜ°ΒΡΙΐ≥Χ÷–Θ§–η“ΣΩΦ¬«ΒΫΒγΧίΡΎΒΡΩ’Φδœό÷ΤΓΔ≥ΥΩΆΒΡ…μΧεΉ¥ΩωΓΔΒγΧίΒΡ‘Υ––Ή¥Χ§Β»ΕύΗω“ρΥΊΘ§÷ΤΕ®≥ωΉν”≈ΒΡ––Ϋχ¬ΖΨΕΓΘ
‘Ύ Βœ÷¬ΖΨΕΙφΜ°ΦΦ θ ±Θ§Ω…“‘≤…”ΟΗς÷÷≤ΜΆ§ΒΡ¬ΖΨΕΙφΜ°ΥψΖ®Θ§±»»γΜυ”ΎΆΦ¬έΒΡΥψΖ®ΓΔΜυ”ΎΥ―ΥςΒΡΥψΖ®Β»ΓΘΤδ÷–Θ§Ήν≥Θ”ΟΒΡΥψΖ®÷°“Μ «A*ΥψΖ®Θ§ΗΟΥψΖ®Ά®Ιΐ‘ΎΆΦ…œΥ―ΥςΒΟΒΫΉνΕΧ¬ΖΨΕΘ§ΡήΙΜ‘Ύ±Θ÷Λ–ß¬ ΒΡΆ§ ±Θ§»Ζ±Θ≥ΥΩΆΒΡΑ≤»ΪΓΘ¥ΥΆβΘ§ΈΣΝΥΧαΗΏ¬ΖΨΕΙφΜ°ΦΦ θΒΡΩ…ΩΩ–‘ΚΆΉΦ»Ζ–‘Θ§ΜΙ–η“ΣΕ‘ΥψΖ®Ϋχ––”≈Μ·ΚΆΗΡΫχΘ§±»»γ”≈Μ·ΒγΧίΡΎ≤ΩΒΊΆΦΒΡΨΪΕ»ΓΔΩΦ¬«≥ΥΩΆΒΡΗω»ΥœΑΙΏΒ»“ρΥΊΓΘ
ΜζΤς»Υ≥ΥΧίΦΦ θ…φΦΑΒΫΕύΗωΒΉ≤ψΦΦ θΘ§Αϋά®±ΕΦ”–≈»Υ Ν≥ Ε ±πΦΦ θΓΔΜΖΨ≥Η–÷ΣΦΦ θΚΆ¬ΖΨΕΙφΜ°ΦΦ θΒ»ΓΘ’β–©ΦΦ θΒΡ Βœ÷Ω…“‘ΈΣ≥ΥΩΆΧαΙ©ΗϋΦ”±ψΫίΓΔΑ≤»ΪΚΆ φ ΒΡ≥ΥΧίΧε―ιΓΘ‘Ύ Βœ÷ΜζΤς»Υ≥ΥΧίΦΦ θ ±Θ§–η“Σ≥δΖ÷ΩΦ¬«≥ΥΩΆΒΡ–η«σΚΆΑ≤»ΪΘ§Ά§ ±Ε‘ΒΉ≤ψΦΦ θΫχ––”≈Μ·ΚΆΗΡΫχΘ§“‘ΧαΗΏΜζΤς»Υ≥ΥΧίΦΦ θΒΡΩ…ΩΩ–‘ΚΆ ”ϖ‘ΓΘ
‘ΎΈ¥ά¥Θ§ΥφΉ≈»ΥΙΛ÷«ΡήΚΆΜζΤς»ΥΦΦ θΒΡ≤ΜΕœΖΔ’ΙΘ§ΜζΤς»Υ≥ΥΧίΦΦ θ”–ΆϊΫχ“Μ≤ΫΆξ…ΤΚΆΤ’ΦΑΘ§ΈΣ»ΥΟ«ΒΡ…ζΜν¥χά¥Ηϋ¥σΒΡ±ψάϊΚΆ–߬ ΓΘ±»»γΘ§Ω…“‘Ά®ΙΐΫαΚœ”ο“τ Ε±πΦΦ θΘ§ Βœ÷ΗϋΦ”÷«ΡήΜ·ΒΡ≥ΥΧίΖΰΈώΘ§±»»γΆ®Ιΐ”ο“τ÷ΗΝνΑο÷ζ≥ΥΩΆ≤ΌΉςΒγΧίΒ»ΓΘ¥ΥΆβΘ§‘ΎΈ¥ά¥Θ§ΜζΤς»Υ≥ΥΧίΦΦ θΜΙΩ…“‘”Π”Ο”ΎΗϋΦ”ΙψΖΚΒΡ≥ΓΨΑΘ§±»»γ“Ϋ‘ΚΓΔ…Χ≥ΓΒ»Θ§ΈΣ»ΥΟ«ΧαΙ©ΗϋΦ”÷«ΡήΜ·ΓΔ±ψΫίΜ·ΒΡΖΰΈώΓΘ
Ήή÷°Θ§ΜζΤς»Υ≥ΥΧίΦΦ θ «ΜζΤς»ΥΦΦ θΝλ”ρ÷–ΒΡ“ΜΗω÷Ί“Σ”Π”Ο≥ΓΨΑΘ§…φΦΑΒΫΕύΗωΒΉ≤ψΦΦ θΘ§Αϋά®±ΕΦ”–≈»Υ Ν≥ Ε ±πΦΦ θΓΔΜΖΨ≥Η–÷ΣΦΦ θΚΆ¬ΖΨΕΙφΜ°ΦΦ θΒ»ΓΘΆ®ΙΐΕ‘’β–©ΦΦ θΒΡ”≈Μ·ΚΆΗΡΫχΘ§Ω…“‘ΈΣ≥ΥΩΆΧαΙ©ΗϋΦ”Α≤»ΪΓΔ±ψΫίΓΔΗΏ–ßΒΡ≥ΥΧίΧε―ιΘ§ΈΣ»ΥΟ«ΒΡ…ζΜν¥χά¥Ηϋ¥σΒΡ±ψάϊΚΆ–߬ ΓΘ
±ΨΈΡ±ξ«©ΘΚΜζΤς»Υ≥ΥΧίΒΡΦΦ θΫβΈωΘΚ±ΕΦ”–≈»Υ Ν≥ Ε ±πΓΔΜΖΨ≥Η–÷ΣΓΔ¬ΖΨΕΙφΜ°Β»
- …œ“ΜΤΣΘΚΫι…ήΜζΤς»Υ≥ΥΧίΒΡΒγΩΊΦΦ θΫβΈω 2023/11/28
- œ¬“ΜΤΣΘΚΜζΤς»ΥΉ‘÷ς≥ΥΧί”–ΡΡ–©”≈ ΤΘΩ 2023/11/25